
Overview
Recently I have been working/designing a UAV system, to be able to detect people, then from that be able to relay this to a ground station. I like it call the this system UAVS (Unmanned aerial vehicle Sighting)
Reason
On large ships, when a person is overboard (MOB), there is very little that can be done, apart from release a Lifebuoy, however often in large waves, it is very easy to lose sight of the MOB. So using a UAS system it means that you can get an aerial view, hopefully allowing for the MOB to be found and rescued.
Technical Overview
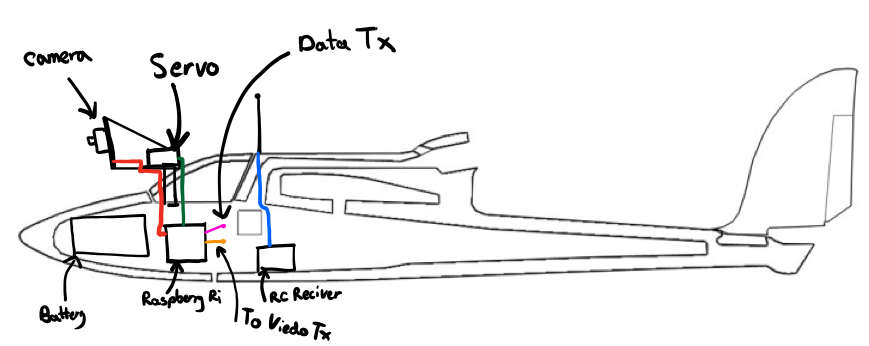
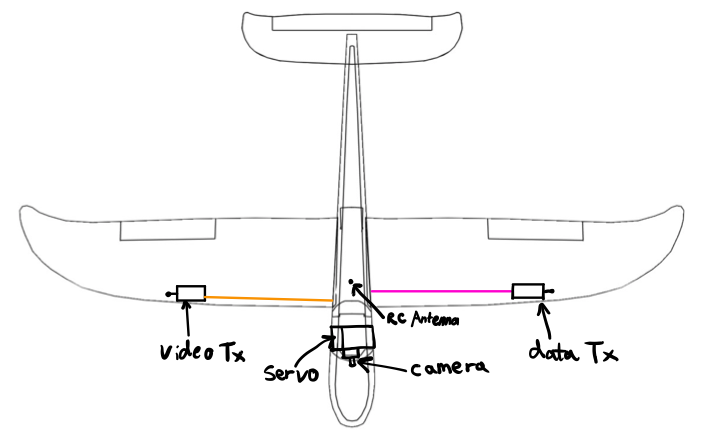
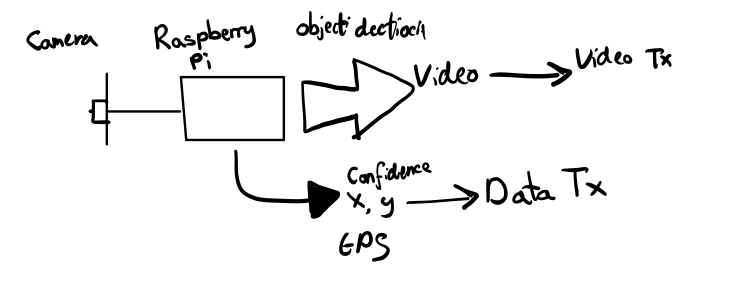
I have planned to use a single Raspberry Pi to run both the servos, to allow for the 2 freedoms of movement, also allowing for the camera to seek and find objects on the ground/sea.
The Raspberry Pi is running a software called YOLO which is an object detection and recognition system so far has been very reliable about identifying objects. However since the Raspberry Pi CPU power is very limited it means that the there is a significant drop in frames during the recognition process which could be problematic. However the solution is simply to use a more powerful device.
Overview of Systems
- Plane: Bixler 2
- Camera Simple HD Usb camera (However Thermal optics, would be ideal for night time operations)
- AI recognition system: Tensorflow
- Video transmitter: Fat Shark 600mW 5.8 GHz A/V Transmitter
- Control system: Futaba
- Battery: 2x 1600 mAh 3s LiPo (1x for Motor Power and Another for the Raspberry Pi)
Possible problems
Though this solves the problem of sighting, it still needs to be autonomous, right now it needs a person to operate the UAS, and observe sightings in the video link. So would require training and special equipment which is not practical for many instances.
Another possible problem is that since the drone is very light in order to maximise flight time. It means that in high winds like during a storm it will be blown very quickly away from the ship. To combat this it could make since to use a Quadcopter in order to have more control during storms. However during light winds it makes since to use a light plane. Since it allows for a greater distance to be covered.
Future
I will try and update this Blog with all the progress from this project, so expect updates shortly.